本文内容总结自孙家广《计算机图形学》
直线段绘制算法的发展基本是从数值微分法
到中点画线法
再到Bresenham画线算法
目前流行的渲染器使用的都是Bresenham画线算法,前两个也可以了解一下
数值微分直线算法
众所周知我们生活的现实世界的一切都是离散的(我胡说的),DDA直线算法就是用离散像素点去逼近直线段的一种算法。
我们先来看一下直线的函数表达,最常用的斜截式(顺便练练Markdown的数学公式= =)
y=kx+b
k=ΔxΔy
显示屏幕无论分辨率有多少总之还是一个一个点,在画线段的时候,已知两个端点,就是要把中间的点画出来,我们假设起点(x1,y1),终点(x2,y2),画线段时我们从x1开始,再怎么样x轴的增量也得是整数,1的整数倍,那么很自然的可以得出以下结论:
yi=kxi+b
yi+1=kxi+1+b
由于步长一定是1的倍数
yi+1yi+1=k(xi+1)+b=kxi+k+b=kxi+b+k=yi+k=yi+k
可以发现y的步长增量是k
举个例子:
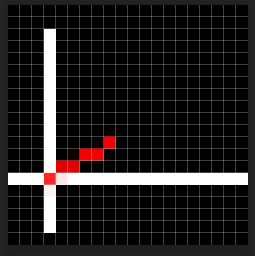
我们要画出P0(0,0)到P1(5,3)的直线段。
用PS随便画了一下,长这个样子:
推算过程如下:
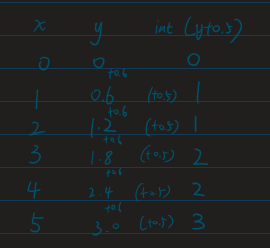
加0.5是为了向下取整的时候减少误差,比如P(1.7,0.8)这个点更接近的整数点应该是(2,1),直接向下取整会变成(1,0)
那为啥不四舍五入呢
四舍五入也是加0.5再向下取整
DDA算法有比较明显的缺点,斜率大于1的线段取点会不正常:
y=1.5x+1
我们画一个P(0,0)到P(5,8.5)
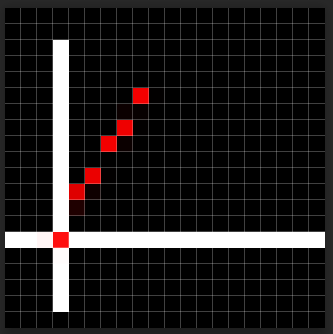
已经很难说这是个线了……取点太稀疏,中间直接断掉了
中点画线算法
这个算法在数值微分算法上改进,数值微分法步进增量一般情况下都是小数,中点画线可以改进为整数。
我们知道直线的一般式方程是这样的:
Ax+By+C=0
A=−(Δy)
B=Δx
C=−B(Δx)
对于直线F(x,y),点有三种情况
F(x,y)F(x,y)F(x,y)=0点在直线上>0点在直线上方<0点在直线下方
每次在最大位移方向上走一步,另一个方向上走不走取决于中点误差
假定0⩽∣k∣⩽1,每次在x方向上加1,y方向上只有两种情况,加1或者不加1,也就是说P(xi,yi)的下一个点有可能是Pu(xi+1,yi+1)或者是Pd(xi+1,yi)
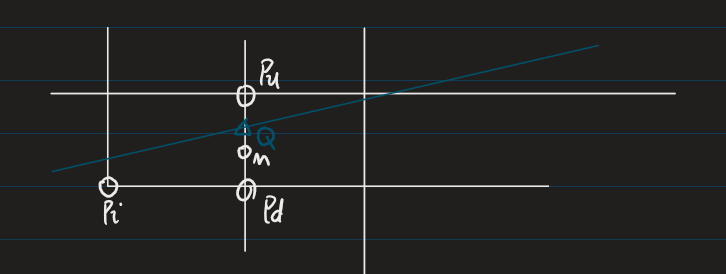
如图所示,Q是直线的理想点,M是Pu和Pd的中点M(xi+1,yi+0.5)
如果Qy大于My说明Pu距离理想直线更近,否则是Pd更理想
那么问题就变成了怎么判断Q与M的关系
假设我们有点P(x0,y0),那么我么下一个点P1虽然不确认y值,但是下一个理想的中点M1(x1+1,y1+0.5)是确定的,那么我们就有步进增量:
d0=F(xi+1,yi+0.5)=A(xi+1)+B(yi+0.5)+C=A+0.5B
d1=F(xi+2,yi+1.5)=A(xi+2)+B(yi+1.5)+C=A(xi+1)+B(yi+0.5)+C+A+B=d0+A+B
实际上起点是(0,0),所以有:
di=F(xi+1,yi+0.5)=A(xi+1)+B(yi+0.5)+C=A+0.5B
d0=A+0.5B
若d<0则取点Pu
若d>0则取点Pd
等于0随便取一个
然后就能得到关于d的步进:
dnew={dold+A+B,d<0dold+A,d⩾0
当然,为了提高效率,避免浮点数加法,一般把d扩大一倍,就得到2d0=2A+B
这样就是,每到下一步,先计算dnew,然后就可以判断选yi还是yi+1
接下来画一个中点画线法的直线:
从(0,0)到(5,2)
| x |
y |
d |
| 0 |
0 |
1(初始值) |
| 1 |
0 |
-3 |
| 2 |
1 |
3 |
| 3 |
1 |
-1 |
| 4 |
2 |
5 |
| 5 |
2 |
1 |
Bresenham画线算法
这个算法描述起来很简单。
我们计算机画点都得是整数,第一个点直接四舍五入是一定可以确认的,那么下一个点的话,用x增量的话下一个必定是x+1,我们需要确定y
Bresenham画线算法计算y的误差,就是斜率k,第一个点画完后画第二个点,y的增量是k,x每增加1,误差增加k,假设误差为d,那么递增直线的误差d=d+k,当d⩾0的时候就需要减去1,始终保证d在0和1之间,这样在d小于0.5的时候,y不变,否则y增加1
思路就是这个思路,当然书上对该算法进行硬件实现的时候用整数改进了除法
既然是判断d和0.5的关系,那么就是判断d减去0.5之后与0的关系,但这样开始要计算k
我们用e来表示d减去0.5
比较e和0的关系其实就只是关注e的正负号而已
代码实现的时候e=−0.5(初始值),递增k,大于等于0的时候减1
首先乘2,浮点数没了,还要想一下怎么把k弄掉,k还是需要一个浮点数除法
e2eΔx∗2e=e+k=2e+2ΔxΔy=Δx∗2e+Δy
也就是说我们定义一个g
g=2e∗Δx
那么就有了新的递增计算:
g=g+2∗Δy
新的初始值:
e2e∗Δxg=−0.5=−Δx=−Δx
到这里就完成了整数算法